

 Testco
Testco
Testco supplies a comprehensive range of products - relays, solenoids, sensors, LEDs, resistors, circuit protection, switches, and power components - serving customers across the semiconductor, test & measurement, medical, industrial, automation, consumer applications, defense, and more.
 Low-Cost, Power Efficient EMG Prosthetic Hand (Part 2)
Low-Cost, Power Efficient EMG Prosthetic Hand (Part 2)
Creating a low-cost prosthetic arm is challenging, but making one that is also easy to calibrate and accurate is even tougher.
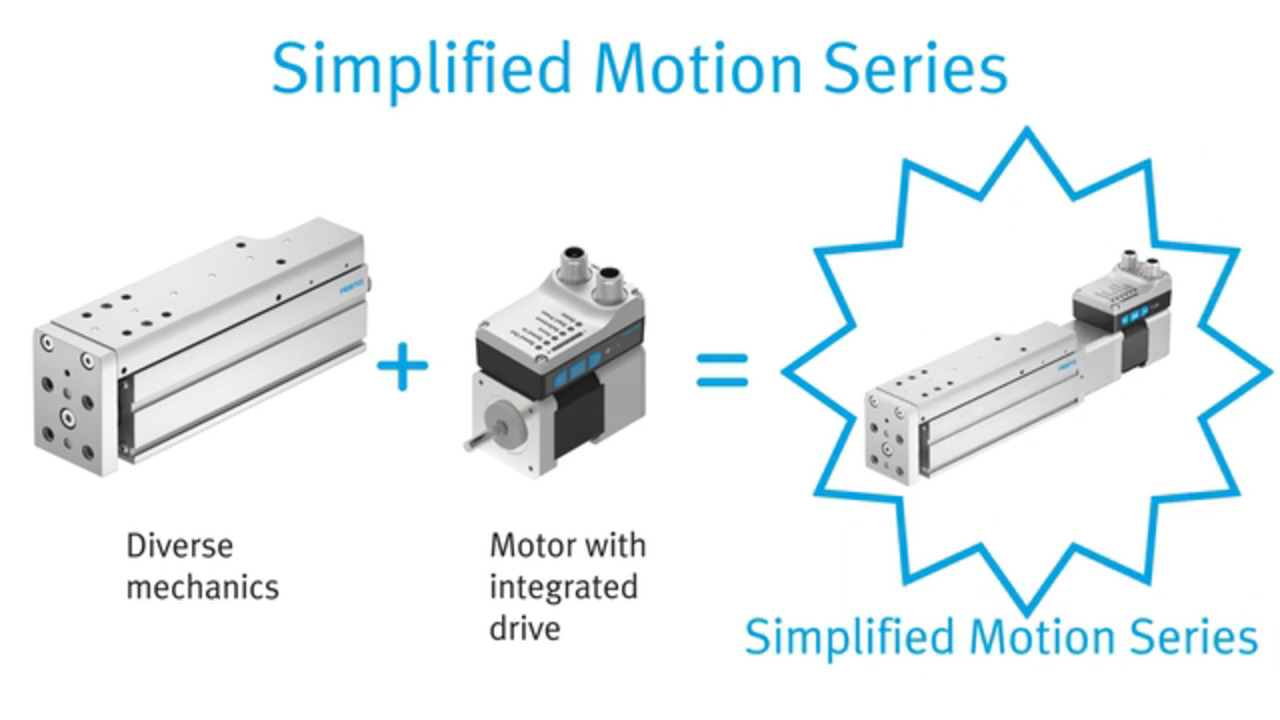
Discover Festo’s Simplified Motion Series (SMS), an easy to use electric actuator solution that bridges pneumatic simplicity with electric automation for positioning, pressing, and handling applications.
 DigiKey erweiterte sein Portfolio im 1. Quartal 2026 um fast 31.000 neue Komponenten und 97 Anbieter
Datum der Veröffentlichung: 2026-04-28
DigiKey erweiterte sein Portfolio im 1. Quartal 2026 um fast 31.000 neue Komponenten und 97 Anbieter
Datum der Veröffentlichung: 2026-04-28
DigiKey hat seinem Portfolio fast 31.000 neue Produkte hinzugefügt, die ab dem 1. Quartal 2026 für eine schnelle Lieferung zur Verfügung stehen.
 Driving cost efficiency for OEMs and panel builders with the ATV320
Driving cost efficiency for OEMs and panel builders with the ATV320
This webinar will introduce how the Schneider Electric Altivar™ ATV320 variable frequency drive (VFD) helps meet those challenges through a combination of flexible installation options, broad motor compatibility, and powerful embedded features.
 Controlling an XRP Robot with Home Assistant via ESPHome
Aktualisiert: 2026-03-26
Controlling an XRP Robot with Home Assistant via ESPHome
Aktualisiert: 2026-03-26
Build a low-latency XRP robot control system using ESPHome and a UART WiFi bridge. Stream sensors, control motion, and integrate with Home Assistant.
 Webinar - Technologien für Drohnen, Autonomie und eVTOL
Webinar - Technologien für Drohnen, Autonomie und eVTOL
In diesem Webinar wird vorgestellt, wie die frequenzvariable Motorsteuerung Altivar™ ATV320 von Schneider Electric zur Bewältigung von Herausforderungen bei der Motorsteuerung beiträgt.
 Building a Dynamometer for the Openwheel Project - Part 1
Building a Dynamometer for the Openwheel Project - Part 1
Explore a custom-built dyno for hub motors using load cells and Arduino, enabling accurate power and torque measurements.
 Webinar - Mehr Kosteneffizienz für OEMs und Schalttafelbauer mit dem ATV320
Webinar - Mehr Kosteneffizienz für OEMs und Schalttafelbauer mit dem ATV320
In diesem Webinar wird vorgestellt, wie die frequenzvariable Motorsteuerung Altivar™ ATV320 von Schneider Electric zur Bewältigung von Herausforderungen bei der Motorsteuerung beiträgt.
This unboxing video gets you started on building motor-control based applications using PSOC™ Control C3 (KIT_PSC3M5_2GO). The kit is supported by application notes, code examples, training materials and ModusToolbox™.
 Halbleiterlösungen für die Stromversorgung, Motorsteuerung und Isolierung in der Automobiltechnik
Datum der Veröffentlichung: 2026-04-01
Halbleiterlösungen für die Stromversorgung, Motorsteuerung und Isolierung in der Automobiltechnik
Datum der Veröffentlichung: 2026-04-01
Informieren Sie sich über die Halbleiterlösungen von Toshiba für die Automobilindustrie, einschließlich MOSFETs, Dioden, Isolatoren und Motortreiber-ICs. Das gesamte Angebot wurde auf Zuverlässigkeit und AEC-Q100-Konformität bei Elektromobilitäts-, BMS- und Stromversorgungsanwendungen ausgelegt.

This video explores how Autonomous Guided Vehicles (AGVs) and Autonomous Mobile Robots (AMRs) are revolutionizing modern manufacturing and logistics by automating material flow.
 Auswahl von Kabeln für eine zuverlässige VFD-Motorsteuerung und Sensorrückmeldung
Datum der Veröffentlichung: 2026-03-24
Auswahl von Kabeln für eine zuverlässige VFD-Motorsteuerung und Sensorrückmeldung
Datum der Veröffentlichung: 2026-03-24
Die zunehmende industrielle Automatisierung und das Streben nach besserer Energieeffizienz beschleunigen die Einführung von VFDs in motorgetriebenen Systemen.
 Magnetische Haptik-Linearaktuatoren MAG1020BEL40
Datum der Veröffentlichung: 2026-03-19
Magnetische Haptik-Linearaktuatoren MAG1020BEL40
Datum der Veröffentlichung: 2026-03-19
Magnetische Haptik-Linearaktuatoren MAG1020BEL40 von INEED Motors liefern ein extrem reaktionsschnelles, originalgetreues haptisches Feedback für eine neue Generation von interaktiven Geräten.

Introduction & Setup on Dart Controls' EZ VFD.
 Accelerating the evolution of smart robotics and autonomous machines
Accelerating the evolution of smart robotics and autonomous machines
From collaborative robots on factory floors to autonomous mobile robots in dynamic environments, learn how ADI’s innovative technologies deliver real-time perception, localization, motion control, and secure connectivity—enabling smarter, safer, and more adaptable machines.

Our customers are constantly upgrading their automation systems. Adding digital control is a common step, and this product is the result of many requests for a digital speed setting control with the option of NOT requiring and encoder.

We are honored to be inducted into the Indiana Manufacturers Association Hall of Fame!! A little about Dart!

The advanced features and options available for the ASP digital closed loop speed pot.
The MicroDrive Series from Dart Controls is the only integrated digital DC speed control on the market. This single device takes the place of many discrete components, saving cost, time and space.

