Mfr Part # SEN0240
GRAVITY ANALOG EMG SENSOR BY OYM
DFRobot
Biometrics Electromyography (EMG) Gravity
The crowning achievement of most undergraduate degree programs is the senior capstone project. It represents the culmination of years of blood, sweat, and tears in rigorous coursework presented in the form of a physical, hands-on project. Needless to say, when students choose their project, they shoot for the stars. For my group, we were no different.
Prosthetics are advancing at a rapid pace, and although they’re starting to become widely available, they’re not getting any cheaper. Developing prosthetic technology that is both affordable and functional is challenging in today’s space, mainly due to the costly fabrication and specialized calibration requirements. With how easy it is to get access to electronics these days, we aimed to create an affordable and easily implementable option through the form of off-the-shelf and common parts. After initial research, we settled on creating a 3D-printed electromyographic (EMG)-controlled hand for below-the-elbow amputees as a start.
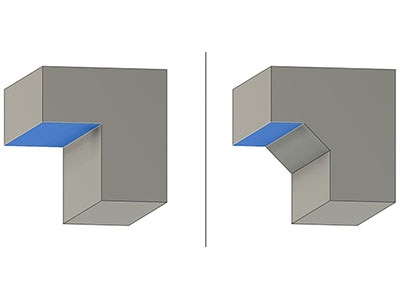
The human body operates similarly to how an embedded system would: our senses collect data, our brain processes information, and electrical signals are sent to move our muscles. In order to move our muscles, motor neurons send electrical signals and impulses to cause our muscle fibers to activate. These electrical signals, while very small, propagate through the surrounding tissue and can easily be detected by electrodes placed non-invasively on the surface of the skin.
")
As a result, surface EMGs provide an easy-to-use method of collecting and calibrating signals that would be sent throughout the body. In the case of an amputee, these electrical signals would still be sent throughout the body, but wouldn’t be received by the muscles that would be used, allowing us to leverage this phenomenon to create a prosthetic.
We chose EMGs mainly because of their non-invasive and easy-to-deploy nature, but also because they are a natural and intuitive interface. The gestures and signals that would be sent are akin to what a normal human would do. It utilizes the existing neuromuscular system and would allow us to calibrate it on most people. This improves usability, reduces the learning curve, and most importantly, keeps affordability and deployability at the forefront. Although resolution is limited, we aim to utilize machine learning to fill the gaps and enable a reliable classification of predefined gestures.
Our project’s approach is to attack affordability by 3D-printing a low-cost prosthetic hand and calibration by using multiple single-channel dry-electrode EMG sensors placed around the wrist to collect signals. We aim to leverage signal processing, embedded machine learning, and open-source design principles to deliver an intuitive and reliable solution at a cost below $300.
The prosthetic operates by taking the raw EMG signals from the dry-electrode sensors and pushing them into a spectrogram via a fast-Fourier transform (FFT). We could then classify gestures like opening and closing a hand through a convolutional neural network (CNN) and map that classification to finger motion. This would allow for complex motion control with very low hardware requirements.
")
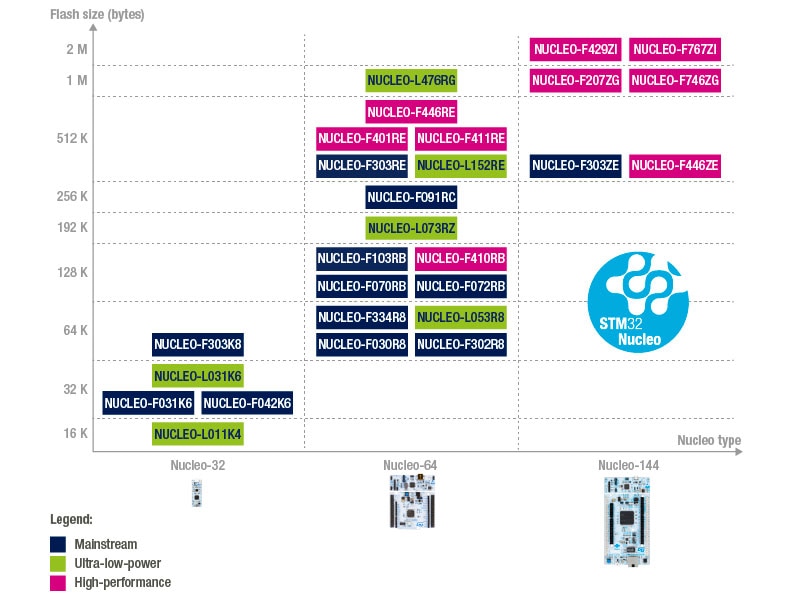
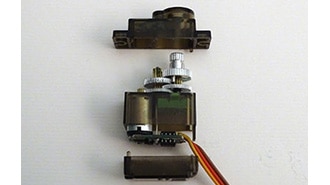
At the heart of it all would be an STM32 microcontroller, mainly because of its fast 12-bit ADC, robust processing ability, and wide community support. The electrode would capture muscle activation from the wrist of the forearm, and since EMG signals are extremely sensitive, low-amplitude, and susceptible to noise, the signal would be sent through a signal processing system that would amplify, filter, rectify, and clean the output. Notably, each person’s EMG would vary slightly, so we would have to calibrate for each individual person. The microcontroller would then operate servos or other parts in the arm according to the gesture received.
")
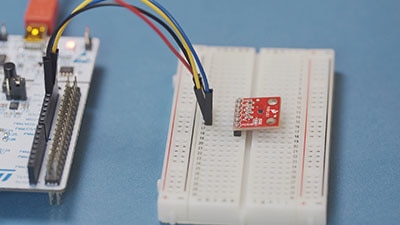
So far, we’ve received the parts and started to do initial testing. We’ve used the DFRobot OYM Gravity Analog Sensor to get us started and to do some initial testing.
Our main issues have come from the signal processing part, where testing the electrodes has given very mixed results. For most gestures, it is hard to classify and tell each one apart (outside of closing and opening a hand), as evidenced by the initial spectrograms.
Nevertheless, software troubleshooting will continue, and hardware implementation will begin. The next blog will discuss our software approach and the further testing that will continue into the Winter Quarter.